20
control a low conductivity dosing pump.
P.I.D. CONTROL MODE
PID control is designed to eliminate the cycling associated
with ON/OFF control in a rapid and steady way by means of
the combination of the proportional, integral and derivative
control methods.
With the proportional function, the duration of the activated
control is proportional to the error value (Duty Cycle Control
Mode): as the measurement approaches setpoint, the ON
period diminishes.
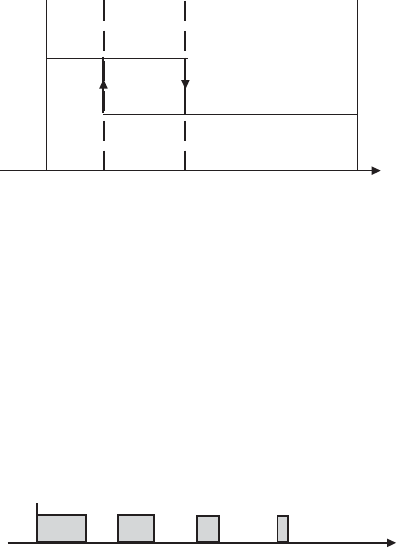
The following graph describes the EC/TDS process controller
behavior. Similar graph may apply to the controller.
During proportional control the process controller calculates
the relay activation time at certain moments t
0
, t
0
+T
c
, t
0
+2T
c
etc. The ON interval (the shaded areas) is then dependent
on the error amplitude.
With the integral function (reset), the controller will reach a
more stable output around the setpoint providing a more
accurate control than with the ON/OFF or proportional ac-
tion only.
The derivative function (rate action) compensates for rapid
changes in the system reducing undershoot and overshoot of
the EC or TDS value.
During PID control, the ON interval is dependent not only on
the error amplitude but even on the previous measurements.
Definitely PID control provides more accurate and stable con-
trol than ON/OFF controllers and it is best suitable in system
with a fast response, quickly reacting to changes due to ad-
t
0
t
0
+T
c
t
0
+2T
c
t
0
+3T
c
ON
OFF
EC
Setpoint +
Hysteresis
Setpoint

















































